

-161x161.png)
-161x161.png)
Grozs
Jūsu iepirkumu grozs ir tukšs! 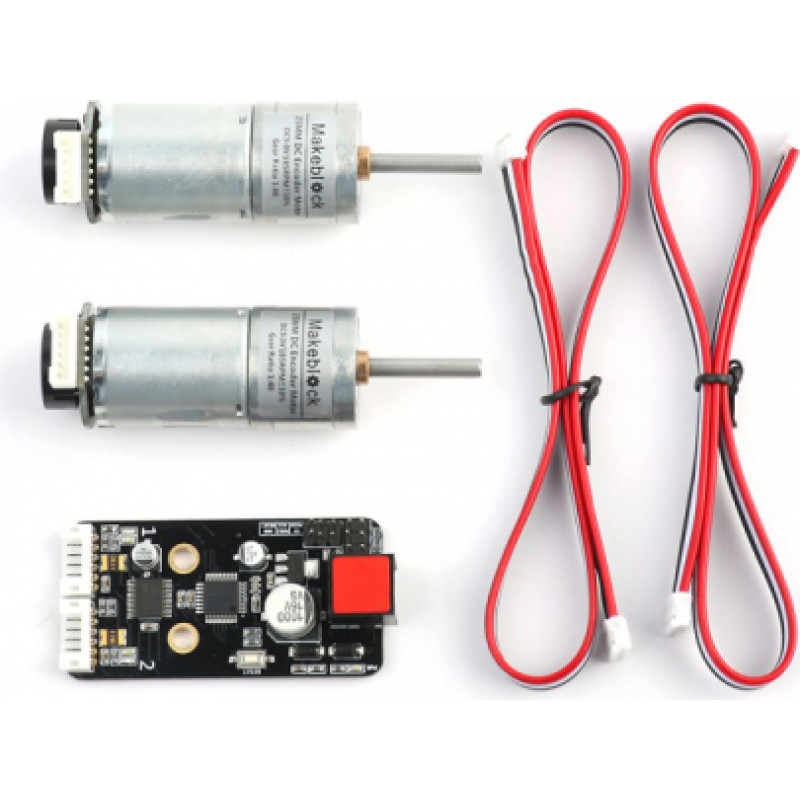





25mm Motors Set With Optical Encoder – 9V/185RPM
84.55€
(Bez PVN: 69.88€)
The motor speed is 185 rpm, torque 0.9 kg*cm (0,09 Nm). A constant current is 0.5 A. Devices have an optic encoder. The set includes two DC motors with encoders, the driver of the motors and two wires for installing. The driver has a built-in PID controller operating in control mode, position and speed, which allows for accurate determination of speed and distance, which the robor needs to cover, the angle of elevation of the shoulder, etc.